
This Article From Issue
January-February 2013
Volume 101, Number 1
Page 58
DOI: 10.1511/2013.100.58
THE BIG MUDDY: An Environmental History of the Mississippi and Its Peoples, from Hernando de Soto to Hurricane Katrina. Christopher Morris. xiv + 300 pp. Oxford University Press, 2012. $35.
As I write this review, images of Hurricane Sandy fill the news media. My mother’s hometown, Staten Island, was devastated by stormwater surge. The streets where she once played are now soaked in a toxic muck deposited by floodwaters. Hardened fortifications built to separate land from water have failed. And in that failure’s wake, we learn of children swept from their mothers by the water’s surge, an elderly woman who drowned in her daughter’s arms, and houses knocked off their foundations by the force of the water.
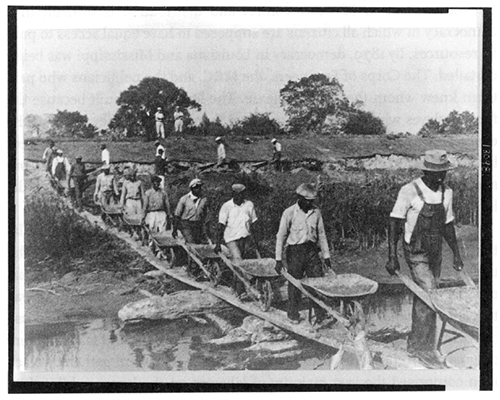
From The Big Muddy.
Ad Right
These stories haunt a nation that still remembers Hurricane Katrina, during which a massive infrastructure of levees built to separate land from water failed, leaving thousands of the most vulnerable stranded by rising waters and bureaucratic incompetence. Katrina was then only the latest in a long series of floods in the Mississippi River basin, and it’s unlikely to be the last. Each time the Mississippi sweeps over the levees, another wave of politicians lays blame on past decisions and promises to fix the problem. In The Big Muddy: An Environmental History of the Mississippi and Its Peoples, from Hernando de Soto to Hurricane Katrina, environmental historian Christopher Morris offers a valuable corrective to those who would tell simple stories about who is responsible for these disasters. Problems in the basin, Morris argues, developed not just because of inadequate scientific models or poor engineering. They have deeper roots: namely, a belief that people can and should separate water from land.
Morris’s core argument in The Big Muddy is that we have denied the Mississippi’s history, and in so doing we have made it impossible to restore resiliency to a degraded river system. History matters, in other words. Over hundreds of years, he writes, Europeans and their American descendants in the Mississippi River basin “dried one of the world’s greatest natural wetlands. They did so by first imagining the valley as a dry place, and then by technologically separating land and water.” To grow the most profitable commodities, the fertile land of the basin had to be dried. To gain control of new political territories, the annual floodwaters had to be engineered into obedience.
Relying on levees to protect us from rising waters is a bad strategy, not just because levees are expensive and often fail. More importantly, levees let us forget the river’s past as a place where floods created the richness that we now try to capitalize on: “The land has been cleared, dried, and planted so that people can take advantage of the rich soil,” Morris writes, “and yet clearing, drying, and planting has deeply disrupted the system that created and maintained the land in the first place.”
Morris sets out to help us remember the “forgotten past when land and water freely mixed.” His first chapters describe the intertwined ecological and human histories of the Mississippi valley before the arrival of Europeans. American Indian cultures thrived in the basin, for they were able to move with the floods and take advantage of the wetlands’ ecological riches. Huge ruins—earthen structures larger than the Great Pyramid of Giza—testify to their ability to use the basin’s resources.
European adventurers found themselves within a watery world, a tapestry of streams, channels, wetlands, lakes and lush riparian meadows enriched by floodwaters from the shifting Mississippi River. Although American Indians were able to adapt to the flooding, Europeans saw it as something messy, troublesome and inconvenient, a natural chaos that needed to be either avoided or engineered away. Chapters 3 and 4 of The Big Muddy examine the French and their efforts to farm the valley, whereas chapter 5 explores the Spanish governance of the valley. Chapters 6 through 8 illustrate the ways that drying the valley for agriculture has influenced our current landscapes. Morris describes how cotton planters created the political pressure for a levee system—and a social system of racial inequity—that haunt us today. The giant levees required an army of bureaucrats, experts, engineers and politicians to fund and design, and an army of laborers to build and maintain. Those laborers were predominantly African American. As early as the 1700s, plantation owners forced slaves to build levees. And in the wake of the Civil War, Morris notes, as part of a plan by General Nathaniel P. Banks for “‘compulsory’ free labor,” “many of the 700,000 former slaves in the lower Mississippi Valley found themselves once again planting cotton, cutting sugarcane, and building levees.”
To design levee systems, government officials called on the expertise of scientists and engineers, and in Chapter 8, “Engineering the River of Empire,” Morris shows how contested their understandings of natural complexity were. Hydrographers and hydrologists approached flood control from very different scientific perspectives. Hydrographers like Andrew Atkinson Humphreys, chief of the Army Corps of Engineers, likened the lower Mississippi River to an enormous reservoir whose borders could be hardened and protected. Hydrologists, however, believed that “banks and natural levees were not barriers between water and land . . . but a kind of middle zone between the two, partly solid, partly liquid, hard yet porous, and always shifting.” Damaging floods, these hydrologists believed, were caused by deforestation and agriculture in the river’s upper reaches, which suggested that levees would offer less protection than would land-use reform. Hydrographers won the debate over flood control, and a massive effort to build and maintain levee systems resulted.
Chapters 9 and 10 explore the leaks that began to appear in engineered river systems as early as the late 1800s. Levees sprang literal leaks, and the ideologies of engineering control that propped up the physical infrastructure began to sag as well. Yet even when data from actual floods refuted hydrographers’ models and predictions, the bureaucracy of river-control planning made it hard to change course. The book ends with a chapter on the devastation wrought by Hurricane Katrina, yet—surprisingly—Morris offers some evidence that new ways of living and farming in the valley are emerging that take advantage of its “natural abundance and regenerative capacity.” The aquaculture that he describes approvingly is hardly environmentally friendly, but at least it does not try to make a wet land dry.
The Big Muddy focuses on the lower Mississippi River valley, south of Memphis, Tennessee. Neither the book’s title nor its introduction makes it clear that this is not an environmental history of the entire river. The focus on the lower basin means that histories are sometimes disconnected from their larger ecological context. For example, the migratory birds that fly briefly across the pages of this book are seen within only a fraction of their full flyway’s complexity; the sediments that lead to eutrophication in the Gulf of Mexico are disconnected from agricultural and urban changes occurring north of Memphis. These caveats aside, The Big Muddy makes a powerful argument that nature is trying to tell us “something about the way we understand the natural environment and our place within it.” As Hurricanes Katrina and Sandy suggest, we ignore these stories at our peril.
Nancy Langston is an environmental historian and the King Carl XVI Gustaf Professor of Environmental Science at Umeå University’s Department of Historical, Philosophical and Religious Studies. Her current research can be found at sustaininglakesuperior.com. Her most recent book is Toxic Bodies: Hormone Disruptors and the Legacy of DES (Yale University Press, 2010).
American Scientist Comments and Discussion
To discuss our articles or comment on them, please share them and tag American Scientist on social media platforms. Here are links to our profiles on Twitter, Facebook, and LinkedIn.
If we re-share your post, we will moderate comments/discussion following our comments policy.