
This Article From Issue
July-August 2016
Volume 104, Number 4
Page 248
DOI: 10.1511/2016.121.248
THE XENOTEXT: Book 1. Christian Bök. 200 pp. Coach House, 2015. $19.95.
Oh! why hath not the mind
Some element to stamp her image on
In nature somewhat nearer to her own?
Why, gifted with such powers to send abroad
Her spirit, must it lodge in shrines so frail?
—William Wordsworth, The Prelude
Affectionately nicknamed “Conan the Bacterium,” Deinococcus radiodurans, a so-called polyextremophile, has an uncanny ability to rapidly repair damage to its genome. As a result, it can resist the most hostile conditions, from drought to radiation to acid baths to a Martian atmosphere. And if Canadian conceptual poet Christian Bök has his way, it will compose verse that will outlive our Sun.
Ad Right
Bök has earned a reputation for conducting extremely difficult poetic experiments and executing them with technical wizardry. In his award-winning 2001 bestseller Eunoia , for example, he uses only a single vowel in each chapter, a constraint that produces a form known as a univocalic . The first section is composed of words that include no vowels other than a , the second includes no vowels other than e , and so on. To build an appropriate lexicon for this demanding work, Bök read through Webster’s Third International Unabridged Dictionary five times and spent six years writing. His latest poetic challenge takes him into trickier and more technically specialized territory. Taking on the very perishability of text, Bök has devised a novel solution: In composing his verse, he is employing the medium of life itself.
The Xenotext: Book 1 represents the first phase of Bök’s wildly ambitious project—nearly 15 years in the making and still ongoing—of encoding poetry into the genome of the bacterium D. radiodurans . Using a substitution cipher, Bök “translates” his poetry into what he calls a “chemical alphabet” representing a genetic sequence. After simulating the resulting protein’s folding pattern, which is essential for its functioning, Bök sends his specifications to a biotechnical lab that engineers the gene accordingly. Finally, Bök’s team of biologists transplants a plasmid carrying the gene into the bacterium.
But why introduce such complexity into the process of poetic composition? The Xenotext provocatively wagers that—in the face of global catastrophe, whether in the form of ecological collapse, drug-resistant pandemic, or nuclear war—D. radiodurans can preserve at least a bit of humanity’s poetic heritage after the apocalypse. DNA, with its remarkable storage capacity and stability, is perhaps the “natural element,” the worthy vessel for the mind’s substance that Wordsworth expresses longing for in the epigraph above.
IT IS A FELICITOUS coincidence that Bök, born “Christian Book,” is so radically rethinking the media format that his surname evokes. In a 2007 interview with the journal Postmodern Culture, he expressed an explicit desire “to extend poetry…beyond the formal limits of the book,” to have his writing “burgeon into the world, like a horrible parasite, exfoliating beyond itself, evolving along its own trajectory.” Indeed, besides imagining D. radiodurans to be a resilient linguistic ark, Bök has conceived of the bacterium as a living, versifying respondent to his “parasitical” poem.
“The Xenotext,” he explains in the book’s afterword, “consists of a single sonnet (called ‘Orpheus’), which, when translated into a gene and then integrated into a cell, causes the cell to ‘read’ this poem, interpreting it as an instruction for building a viable, benign protein—one whose sequence of amino acids encodes yet another sonnet (called ‘Eurydice.’)” Bök uses the term translate here in an extended sense, which makes us realize the many different levels of encoding and translation necessary for the success of his project. To “translate” his original poem (in the sense of encoding it into a gene), Bök first needs to assign a letter of the alphabet to each of 26 codons, the nucleotide triplets that form the basic units of genetic code. He then writes a sonnet and strings together a transplantable segment of DNA that corresponds to the poem letter by letter. Ultimately, the creation of the benign protein depends on RNA transcription and ribosomal translation, just as the legibility of “Eurydice” depends on a cipher that makes “Orpheus” and “Eurydice” mutually transposable.
The Xenotext: Book 1 doesn’t explain the mechanics of these steps in detail—likely such information will be forthcoming in Book 2—but Bök has given us tantalizing previews of the process in other venues. In a 2011 interview with the Montreal-based magazine Maisonneuve , he says, “Because there exists a codependent, biochemical relationship between any preliminary DNA sequence and its resulting RNA sequence (which creates the string of amino acids in the protein), my two poems must likewise be bijectively codependent for my project to work.” He adds, “No poet in the history of poetics has ever actually imagined creating two texts that mutually encipher each other in this way.”
Bök’s allusion to the Greek myth is apt, showing his commitment to relating novelty to tradition. His ongoing experiment summons the plight of Orpheus, the virtuosic singer who attempts to bring his dead wife, Eurydice, back from the underworld. Orpheus fails, for all his efforts, while on the very brink of success. For the French writer and literary theorist Maurice Blanchot, “Eurydice is the limit of what art can attain.”
The question remains: Can Bök, a virtuosic poet in his own right, surmount the limit of death and achieve true literary immortality? Thus far, he has been successful in provoking Escherichia coli (which Bök used for his initial tests, as it’s simpler and less expensive to engineer) to respond to his implanted verse. He reports that his poem “Orpheus,” which begins “any style of life / is prim,” causes the bacterium to respond by producing another poem, “Eurydice,” which begins “the faery is rosy / of glow.”
This promising development with E. coli yielded proof of concept, but working with D. radiodurans has proved to be much more challenging. When interviewed for a 2015 article in the Calgary Herald , Bök said, “The extremophile is more difficult to engineer and the protein that is produced is not fully expressed. It’s either destroying it too quickly for us to characterize it, or it’s censoring it during its production. We can’t really tell, but it’s not making the entire protein stably. So you can’t read the poem.” Thus, for the moment, Eurydice is silent.
WE WILL HAVE TO WAIT for Book 2 of The Xenotext to ascertain Eurydice’s eventual fate—whether she will be unearthed by Bök’s orphic attempt or remain shrouded in Hades’ impenetrable shadows. In the meantime, Book 1 is, in Bök’s words, “an ‘infernal grimoire,’ introducing readers to the concepts for this experiment.” A heterogeneous set of spin-off poems tangentially related, in theme and technique, to The Xenotext proper, The Xenotext: Book 1 is what Bök calls a “movie trailer for the second book,” which will more directly document his experiments with “Orpheus” and “Eurydice.”
Can Bök, a virtuosic poet in his own right, surmount the limit of death and achieve true literary immortality?
Although some readers may be disappointed that Book 1 does not chronicle the successful insertion of “Orpheus” into D. radiodurans, The Xenotext: Book 1 is nonetheless a volume displaying staggering talent and genuine interdisciplinary imagination. It is at once rigorously scientific and rigorously literary. As Bök dynamically reflects on “biogenesis and extinction,” poetic knowledge and scientific awareness intertwine as if in a double helix. If The Xenotext proper—that is, the actual poem embedded in the bacterium—is a text intended to be recovered by intelligent life long after our planet and civilization have collapsed, then The Xenotext: Book 1 is a kind of introductory sourcebook allowing human readers to at least appreciate its concept in the here and now.
The Xenotext: Book 1 consists of a series of poetic suites, each expressing a tighter relationship with science and a greater degree of formal innovation than its predecessor. In the tradition of French experimental poetry, including that of the Oulipo, a neovanguard group dedicated to exploring both mathematical and nonmathematical constraints, The Xenotext: Book 1 presents a cornucopia of literary structures, from the prose poem to the sonnet to the computer-generated visual poem.
The opening section, “The Late Heavy Bombardment,” is a prose poem beginning with a depiction of the hell on Earth of the Hadean period, the geologic eon during which our highly volcanic planet endured numerous meteoric impacts, setting the stage—somehow—for the formation of life. In a series of rhetorical questions, Bök demonstrates both a manic verve for metaphor making and a methodical penchant for parallel structures:
What dire seed must these onslaughts have scattered, like shrapnel, across your cremated badlands? What prion? What virus? What breed of spore must have emerged, like a spear point or a sword blade, from these early ovens of Auschwitz (each cyanide bonfire, burning in reverse, spitting forth a fitful embryo, cloned from the smoke and the dross)?
Later in the section, Bök imagines a future cataclysmic scenario, a perfect test environment for his hypothetical Xenotext to survive: “What Great Comet has yet to plummet from the heavens, like a rocket engine dousing its jets during splashdown in your oceans of nitroglycerine?”
The next section, “Colony Collapse Disorder,” is a translation of Book 4 of Virgil’s Georgics, a four-book poem about agriculture, completed around 29 or 28 BCE, into 50 fast-moving unrhymed sonnets. Book 4 is, famously, an account of beekeeping, complete with practical instructions (“Contrive that the ingress to the sanctum / of the bees be narrow, made from woven / osiers or cedar braids”). It also enfolds a story within a story, recounting the myth in which Aristæus, a pastoral god, loses his bees and has to coerce the shapeshifting Proteus into divulging the cause of his apiary’s collapse. Proteus relates the tragic tale of Orpheus and Eurydice, explaining that Eurydice’s death had been caused by a snake bite received while she was fleeing a pursuer—none other than Aristæus himself. Proteus reveals that, in vengeance, “Orpheus, / the widower, hath inveighed against” him. Aristæus then makes appeasing sacrifices to Orpheus, Eurydice, and her nymphs to regenerate his beehives.
Bök’s deep engagement with classical literature here connects to a contemporary scientific conundrum: What has been causing the recent decline of honeybees, key pollinators for a range of crops? “Colony Collapse Disorder” gives dimension to intimations of doom that recur throughout the book. In this case, a collapse of apiculture would trigger another in agriculture, which would lead to the collapse of culture writ large.
Bök’s translation of Virgil is a beautiful one—precise, elegiac, intense: “Now harken to the keening of the hive: / not a wind that sighs amid the aspens / nor a tide that booms upon the oceans, / but more akin to some hellish bonfire, / trapped within the crucible of its kiln.” Bök’s nod to Virgil also references the Latin poet’s curious role in biogenetics: In 2003, a team at Icon Genetics enciphered a line from the Georgic's— Nec vero terræ ferre omnes omnia possunt (“Nor can the earth bring forth all fruit alike”)—into the DNA of Arabidopsis thaliana , or thale cress, to show how scientists can effectively label genetically modified organisms. In “Colony Collapse Disorder” we see Bök exploring problems of science through decidedly humanistic and literary lenses. Further, this section demonstrates to critics who may be inclined to view The Xenotext as a mere fetishization of scientific novelty that Bök’s poetic chops and understanding of the Western canon are as good as any classicist’s.
In the section “The March of the Nucleotides,” Bök brings didactic poetry into the 21st century by offering “a poetic primer, reacquainting the reader with some basic ideas in genetics.” Beneath short sections of explanatory prose that read like textbook excerpts (“The information enciphered by the series of bases in a strand of DNA is read from the 5'-end to the 3'-end”), Bök includes poetic fragments that elegantly translate scientific concepts into poetry, converting descriptions of DNA processes into metaphors with considerable aphoristic force: “ DNA is a metamorphic scriptorium, where life transcribes, by chance, whatever life has so far learned about immortality.”
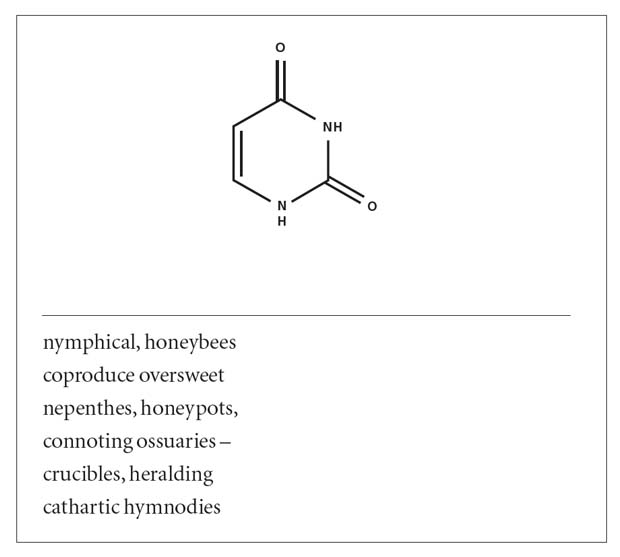
But the highlight of this section is Bök’s experimentation with visually striking poetic configurations and formal constraints—characteristic elements of his work, found not only in Eunoia but also in his 1994 debut, Crystallography. He cleverly acknowledges the structure of DNA and RNA nucleobases through the structure of the poems themselves. He restricts the vocabulary of the poem featuring uracil (C4H4N2O2 ), for instance, to four words beginning with “C,” four words beginning with “H,” two words beginning with “N,” and so on (see poem above). He calls the form a modular acrostic.
“Uracil” begins, “nymphical, honeybees / coproduce oversweet / nepenthes,” and the thick assonance echoing throughout the short piece seems to be figured in the bees’ “oversweet / nepenthes,” nearly to the point of miring down in it. Horace, Virgil’s friend and contemporary, remarked that poetry should be dulce et utile—sweet and useful. Bök takes this Horatian dictum to the extreme as he dazzles us with formalist brilliance while insisting on the importance of scientific literacy if we are to survive as a species.
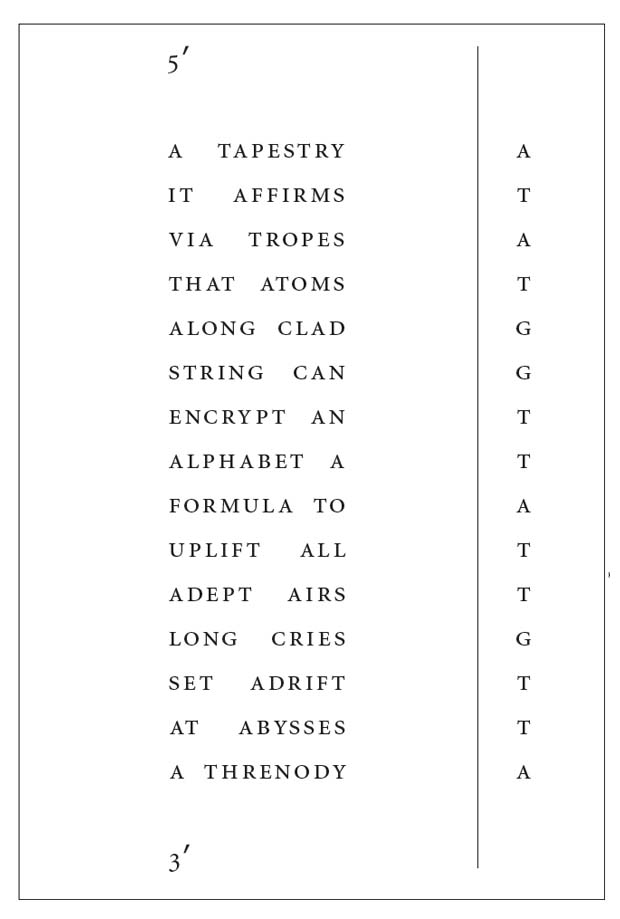
In another, more complicated series of poems, Bök conveys the form of DNA to the two-dimensional page. In a DNA double helix, the nucleobases pair in complementary ways (adenine always bonds with thymine and cytosine always bonds with guanine) because of certain hydrogen bonding patterns; these form the “rungs” of the spiral ladder. In these poems, Bök makes each letter that appears before a gap in the poetic line function as a corresponding nucleotide for the first letter that appears after the gap (see poem below right). Each line has nine letters, and either “A” and “T” or “C” and “G” conjoin, facing each other across the gap as it angles across the poem.
Moreover, the letters on the left-hand side of the gap form a sequence of codons, or nucleobase triplets, from the 5'-end to the 3'-end. The codons, then, have enciphered a chain of 15 amino acids (the chain of isoleucine, serine, isoleucine, alanine, and so on is symbolized as “I S I A L I W L L L I R I F L”), which comprise a segment of protein. Bök then used a supercomputer to simulate models for the protein’s structure, from the folded sequence to its atomic backbone to the entire molecule with its charge envelope (see model, below left). Across the trajectory of this poetic suite, we witness the radical translation of a series of innovative typographical poems into a fascinating series of visual poems without letters or words.
Bök’s processes may seem needlessly convoluted, but they make us productively think about our expectations of what work in the arts and humanities is supposed to accomplish and how that work is regarded by various audiences. For example, if a reader assumes that biotechnical processes of genetic engineering are complex—and, indeed, they are—why would that same reader expect a poem (or a work of literary criticism) to be immediately understandable? Poetic thinking, Bök seems to be arguing, should be as rigorous and, if need be, as complicated as scientific thought.
IN THE REALM of contemporary art and writing, there is a common perception that, since Marcel Duchamp’s bold provocations in the early 20th century, concept has trumped skill. In other words, the sort of idea that drove Duchamp to create, say, his infamous sculpture Fountain (1917)—a prefabricated urinal placed on a pedestal—takes precedence over any considerations of craftsmanship or execution. Indeed, art historian Benjamin Buchloh has remarked on the phenomenon of deskilling , the “persistent effort to eliminate artisanal competence and other forms of manual virtuosity from the horizon of both artistic production and aesthetic evaluation.” The conceptual premise behind Bök’s xenotext project—encoding poetry into bacteria—might strike some as the preposterously high-concept equal of that behind Duchamp’s Fountain.
![Charge envelope for [ I S I A L I W L L L I R I F L ]. From “The March of the Nucleotides,” <em>The Xenotext: Book 1</em> <strong>© Christian Bök 2015. Used with permission of Coach House Books.</strong>](https://www.americanscientist.org/sites/americanscientist.org/files/20166912524211980-2016-07NightstandLeongF3.jpg)
But rather than being an example of deskilled poetry, The Xenotext: Book 1 is hyperskilled: The complex structures that appear throughout the book, which include an extended anagram that is also a double acrostic, assure readers that high concepts and manual virtuosity can go hand in hand. Few poets have the technical excellence (or the patience) to pull off such feats, and in doing so Bök proves that he is as skilled at encoding extra layers of meaning into a poem as he is at encrypting poetry into DNA. Moreover, The Xenotext: Book 1 is an example of what I would call reskilled poetry, one that insists that writers learn new capabilities to respond to the complexities of 21st-century life. In an interview with New Scientist , Bök explained, “In order to do this project I’ve given myself a crash course in molecular biochemistry. I have taught myself computer programming skills; I have done all the genetic engineering and all the proteomic engineering myself. I think that part of the artistic exercise has been to acquire these skills.”
Given the extremity of its concept and its reliance on a mixed array of scientific and representational strategies, The Xenotext: Book 1 is bound to provoke questions from various ideological camps within both scientific and literary studies. What are the gender politics of the call and response of Bök’s projected poems “Orpheus” and “Eurydice”? How viable is Bök’s assertion, based on the work of environmental biologist Chensheng Lu, that the pesticides called neonicotinoids are likely the cause of colony collapse disorder in bees? What are the bioethical ramifications of Bök’s overall project? Whatever the answers to these questions may be, Bök’s work is an important bridge not only between conservative formalists and cutting-edge conceptualists but between poetic and scientific communities. If The Xenotext does not save Bök’s poetry from future apocalypse—we will have to find out in the highly anticipated Book 2—it may, at the very least, save poetry from cultural irrelevance.
American Scientist Comments and Discussion
To discuss our articles or comment on them, please share them and tag American Scientist on social media platforms. Here are links to our profiles on Twitter, Facebook, and LinkedIn.
If we re-share your post, we will moderate comments/discussion following our comments policy.