An Empire Lacking Food
By Craig McClain
Once viewed as a barren expanse, the deep seafloor is a biologically elaborate ecosystem whose fate is tied to life above, near the sea surface
Once viewed as a barren expanse, the deep seafloor is a biologically elaborate ecosystem whose fate is tied to life above, near the sea surface

DOI: 10.1511/2010.87.470
Let me reintroduce you to planet Earth. Nearly 64 percent of its surface, close to 208,640,000 square kilometers, sits below 200 meters of water. The lack of light at those depths prohibits photosynthesis, the biological energy conversion system that is the foundation of most food webs.
Thus our world, with its abundant deep oceans, is dominated by food-poor habitats. The consequences of this reverberate throughout the deep sea—but not in the ways long assumed.
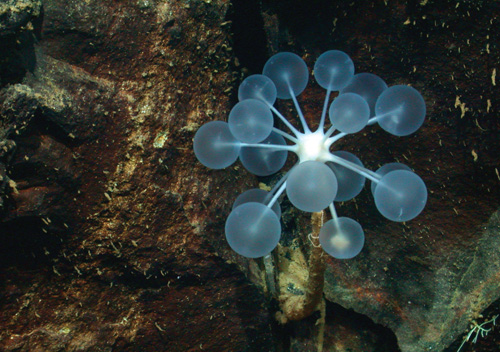
Copyrighted 2003 photograph courtesy of Monterey Bay Aquarium Research Institute.
Two centuries ago scientists believed the lack of photosynthesis, and therefore of plants, precluded the existence of animal life in the deep sea. To those early scientists, the deepest depths represented a vast wasteland littered with shipwrecks and skeletons. But what actually exists on the deep seafloor, now visible thanks to decades of exploration and advances in technology, is more complex than anyone anticipated. And it all starts with organisms dwelling not on the ocean floor but near its surface.
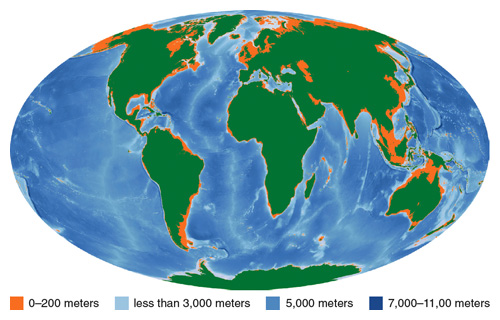
Map courtesy of General Bathymetric Chart of the Ocean, http://www.gebco.net/.
Each year approximately 16 gigatons of carbon fixed by phytoplankton are thought to sink to the ocean interior. This amount is a mere 3 percent of the total produced at the ocean surface. Consider that 3 percent of a five-pound bag of sugar is less that five-and-a-half tablespoons. This small amount of fluxed carbon, carried largely by “marine snow,” dusts the seafloor and represents the only food source for the majority of organisms in the deep. Yet enough carbon arrives to drive every aspect of life in this remote habitat. Conundrums abound in this place where so little food is available. Profound biodiversity exists in the deep sea. Unexpected evolutionary size adaptations and other anatomical novelties are common there—evidence of life’s ability to adapt to environmental extremes.
Edward Forbes is to deep-sea biology what Jean-Baptiste Lamarck is to evolution. Remembered for his mistaken stab at a theory of evolution, Lamarck concluded that an organism could alter a body part during its lifetime and pass this trait to offspring. Giraffes, in his view, stretched their necks to reach fruit high in trees, and the next generation inherited elongated necks. Despite his mistakes regarding how evolution works, Lamarck’s idea that change could be transmitted between generations was right.
Linda Hall Library of Science, Engineering & Technology
Edward Forbes’s big mistake was concluding, in the mid-1800s, that marine life could not exist deeper than 550 meters, what he called the “azoic hypothesis.” Given the state of knowledge at the time, it seemed logical that no species could survive under the extremes of high pressure, lack of light, and cold temperatures characterizing the deepest ocean. Unsurprisingly, Forbes’s thinking spread quickly among the scientific community. The azoic hypothesis ultimately proved wrong, but much like Lamarck’s, Forbes’s ideas contained elements of truth. Forbes realized the importance of food to marine organisms; the lack of light and subsequent preclusion of plants in the deep led him to believe life could not exist there. He did not envision that material sinking from above could provide enough carbon for life to exist on the deep seafloor.
At the ocean’s surface, phytoplankton convert carbon dioxide into usable carbon through photosynthesis. Other organisms consume phytoplankton and in turn are consumed. This continuous feeding produces fecal material. And after enough time all organisms die. Feces, dead organisms and inorganic material shower the deep seafloor continuously. Polymers produced as waste by bacteria and phytoplankton hold these aggregates together. Combined, these form marine snow, the primary food source in the deep sea.
The arrival of marine snow to the seafloor is heterogeneous in both space and time. In coastal regions, phytoplankton production benefits from the upwelling of nutrient-rich waters toward the ocean’s surface. More production at the surface, generally, means more marine snow for the deep. In addition, as distance from shore and depth increase, marine snow must travel through more water to reach the seafloor, increasing the chances that organisms, from bacteria to bony fishes, will consume all or part of it.
In fairness, Forbes could not have been aware of marine snow; it was described well after his death. Nor was he aware of two other factors that form the backbone of modern theory on deep-sea ecosystems. First, biomass, the total weight of all life, on the seafloor closely correlates with the amount of carbon across the ocean’s surface and the subsequent amount of marine snow. In 2007, my colleagues and I reported that increases and decreases in biomass across the deep seafloor in the North Atlantic correlate tightly with variations in plankton production at the ocean’s surface. As a result, the highest biomass is found near coastal regions and in shallower depths—less than a few hundred meters. Through a stroke of unfortunate luck, Forbes sampled the deep eastern Mediterranean Ocean in an area now known to have extremely low primary production on its surface.
Second, dredges available for seafloor sampling in Forbes’s day were amazingly inefficient at capturing small organisms, which ultimately led him to miss a substantial share of the diverse deep-sea fauna. Just decades after Forbes’ pronouncement, Henry Nottidge Mosely wrote: “Some animals appear to be dwarfed by deep-sea conditions.” By the 1970s, Hjalmar Thiel of Universität Hamburg observed that the deep sea is a “small organism habitat.”
Depth is often viewed as a surrogate, albeit an imperfect one, for the variation in food across the deep seafloor because as previously mentioned, increased depth typically translates into less food. Thiel’s seminal 1975 work demonstrated that with increased depth, smaller organisms became more dominant. Deep-sea life falls into four faunal components based on size: megafauna, organisms such as fish, crabs, lobsters, starfish, urchins, sea cucumbers, sponges and corals, which are large enough to be photographed or caught in trawls; macrofauna, such as small polychaete worms, crustaceans and mollusks, which can be captured on a fine-mesh screen but are barely seen with the naked eye; meiofauna, such as forams, copepods and nematodes, which are retained only on very small mesh size; and, lastly, bacteria, the smallest of them all.
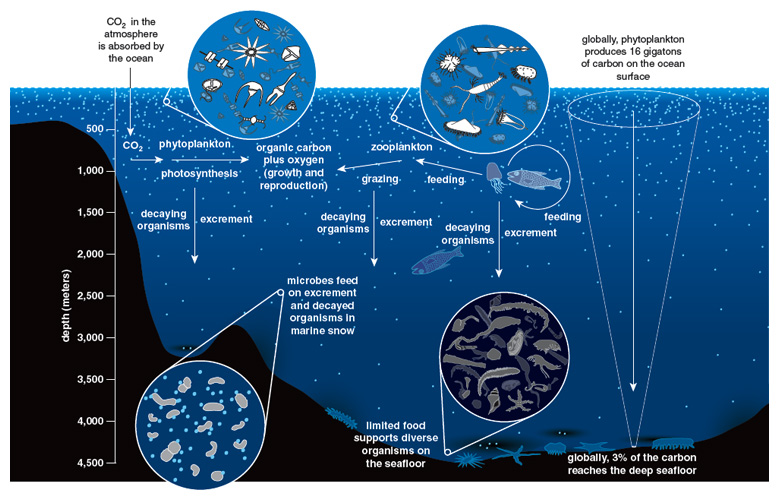
Illustration by Tom Dunne.
Thiel’s specific findings were that megafauna and macrofauna decrease more rapidly with depth than do meiofauna or bacteria. In fact, with increased depth meiofauna and bacteria become increasingly more dominant. Thus, at depths greater than 4 kilometers on the vast abyssal plains where food is extremely limited, there is a shift toward diminutive sizes. In a particularly striking example of this, my doctoral advisor Michael Rex of the University of Massachusetts at Boston and I calculated that our entire collection of deep-sea gastropods from the western North Atlantic— over 20,000 shells—could fit completely inside a single Busycon carica, a fist-sized New England knobbed whelk.
But to say that all creatures of the deep are miniaturized overlooks the complexity of size evolution in this unique habitat. One of the puzzles I faced early in my research was that despite overall miniaturization of deep-sea invertebrates, some taxa actually obtain much larger sizes, approaching gigantism. For example, although deep-sea snails are smaller than their shallow-water relatives, they actually increase in size with greater depth and presumed lower food availability. To further confound the situation, other scientists have reported the exact opposite pattern in other types of snails, whose size decreases with depth. The same appeared to be true in other taxa, such as crustaceans. A question emerged: What biological processes produced these fundamentally opposing trends in body-size evolution?
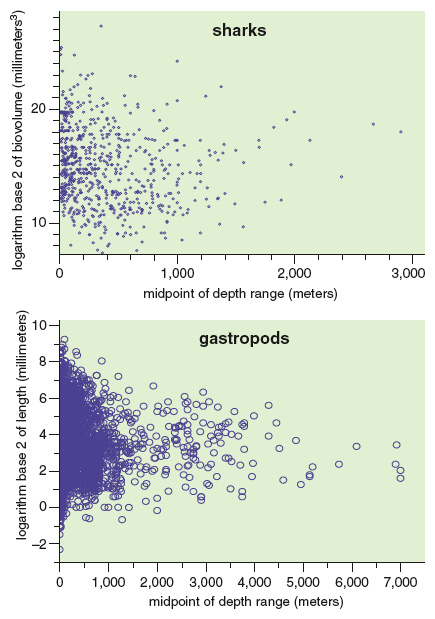
Illustration by Tom Dunne
To answer that, I turned from the Earth’s largest habitat to one of its smallest —islands. Body-size extremes are well documented on islands. The diminished kiwi and the enormous moa of New Zealand, the colossal Komodo dragon on the island of Komodo, the extinct pygmy elephants on the islands of the Mediterranean, the ant-sized frog of the Seychelles, the giant hissing cockroach of Madagascar and the giant tortoise of the Galapagos represent just a few of the multitudes of island size anomalies. In 1964, J. Bristol Foster of the University of East Africa demonstrated that large mammals became miniaturized over time on islands. Conversely, small mammals tended toward gigantism. This occurs with such frequency that scientists refer to it as “Foster’s rule” or the “island rule.” Fewer predators, less competition from other species, reduced habitat area and potentially marginal food sources are all hypothesized to produce these new and sometimes bizarre evolutionary trajectories.
My colleagues and I discovered a similar pattern in 2006 between shallow and deep seas. As shallow-water gastropods evolved into deep-sea dwellers, small species became larger and large species became smaller. Interestingly, size did not shift in a parallel manner. Larger taxa became disproportionately smaller sized—that is, both converged on a size somewhat smaller than medium. I’ve since observed this pattern in radically different taxa, such as bivalves and sharks.
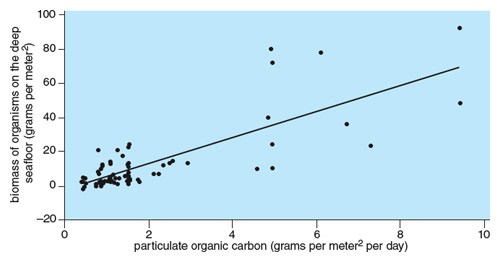
Illustration by Tom Dunne.
The fact that islands and the deep sea have so little in common suggests that the explanation rests with a single trait both habitats share. A paucity of total food likely drives complicated body-size trajectories in the deep sea as well as on islands. On islands, less food is available because smaller land areas support fewer plants at the base of the food chain. In both habitats, there may not be enough total carbon to support populations of giants only. Unable to travel long distances to search for food or to store large fat reserves to fast through periods of food scarcity, smaller organisms are also at a disadvantage. If these contrasting selection pressures were equal, size would be driven to an intermediate. However, the selection against larger sizes is greater, leading toward an evolutionary convergence that is slightly smaller than the intermediate size. Thus, differential responses to food reduction by different-sized organisms may resolve the outstanding paradox of divergent size patterns in the deep.
In the deep sea, evolutionary novelties also abound: Organisms display creative solutions to deal with lower food availability. One of the best examples of defiance of the general trend of miniaturization is the giant isopod Bathynomus giganteus, a 36-centimeter-long deep-sea relative of the common pill bug. It is the largest in the order Isopoda and one of the largest known crustaceans. Baited traps placed on the deep seafloor will, within an hour, quickly attract dozens of these hungry scavengers. Greater body size translates into faster and more efficient running for mammals, and swimming for fish. Francois Bourliere of the University of Paris in 1975 stated that “the fact that a horse can move one gram of its body weight over one kilometer more cheaply than a mouse is another evolutionary advantage of a large body size.” The larger size of the giant isopod may be an adaptation that allows it to quickly and efficiently monopolize food in the deep sea. Larger size also confers a greater foraging area to an organism, whether on land or in sea—no doubt an important trait in a food-limited area.

Image of isopod (top left) courtesy of Robert S. Carney of Louisiana State University. Copyrighted photographs (top right, 2007, and bottom right, 2005) courtesy of Monterey Bay Aquarium Research Institute. Anglerfish photograph (bottom left) courtesy of Justin Marshall of Queensland Brain Institute.
The giant isopod can survive eight weeks between feedings. In aquaria, the gastropod Neptunea amianta, a snail the size of a tennis ball, can survive up to three months between meals. This fasting potential reflects the ability of larger organisms to hold greater lipid reserves. N. amianta also exhibits another intriguing adaptation as a possible response to food limitation: Females lay foot-high, leathery cases containing thousands of eggs. The first young to hatch crawl around the egg case devouring their unborn siblings. Although this may seem malevolent, ensuring the survival of a few young with readily available meals is essential in the deep.
Females in the fish family Ceratiidae ensure their survival in a food-limited environment with the organ responsible for the group’s common name, anglerfish. Evolutionarily derived from the spines of the dorsal fin, a lighted blue lure rests on a stalk above the forehead. Symbiotic bacteria at the lure’s tip produce light that attracts prey to the waiting mouth of the female. Siphonophore jellyfish in the genus Erenna also utilize light to attract prey. Red light, a rarity among luminescent organisms, is emitted when the jellyfish flicks its peculiarly shaped tentacles, making them closely resemble copepods, a food source for many small fish.
Bioluminescence may also help compensate for low food availability in another vital area of life—sex. A low population census resulting from a scant food supply presents a formidable challenge for creatures looking for mates. For many fishes, bioluminescence serves as a different type of lure. In the wittily named paper “Sex with the lights on?” Peter Herring of the University of Southampton in 2007 stated that for a least one family of fish there is “strong circumstantial evidence for [a bioluminescent organ’s] involvement in sexual signaling.” In anglerfish, the difficulty of finding a mate translates into more evolutionary novelty. Significantly dwarfed compared to females, male anglerfish live to find a mate and stick with her. Males seek out females using a heightened olfactory system, Upon contact, enzymes are triggered that fuse his mouth to her body, and eventually all of his organs, except for his gonads, atrophy. The parasitic male becomes a lasting source of sperm.
The rich variety of adaptations to the extremes of food limitation in the deep sea parallels a rich biodiversity of life that would have shocked Edward Forbes. In 1968, Howard Sanders’s comparative study of the seafloor demonstrated that deep-sea diversity exceeded coastal diversity in the temperate zone and approached shallow-water tropical diversity. More recent work suggests macrofaunal diversity in the deep may even rival that of tropical rain forests. In relatively small areas the number of species coexisting in the deep sea is surprisingly high; an area the size of a coffee table on the deep seafloor, it’s now known, could yield more than 300 species.
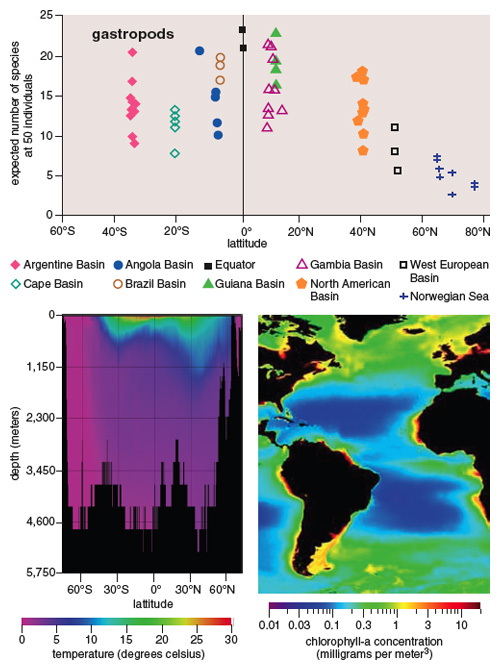
Ocean temperature map was produced by Danielle K. Stoll of the U.S. Geological Survey. Phytoplankton production map, averaged observations from 2002 to this year, was produced by NASA.
However, biodiversity in the deep sea is a paradox. High biodiversity in habitats such as coral reefs and tropical rainforests is thought to reflect the variety of environments and resources available there. Such variety supports multiple ecological niches and a richer, more complex community. In contrast, the flat, muddy seafloor, absent of reefs and forest to provide complexity, appears more homogenous. And all organisms rely on and compete for the same basic food source originating from above.
But it turns out that the deep seafloor is not as homogenous as it first seems. Fred Grassle and Howard Sanders of the Woods Hole Oceanographic Institution proposed in 1973 that the seafloor actually comprised a patchwork of microhabitats extending over scales only centimeters long. In their “patch-mosaic hypothesis,” each patch provides a unique set of environmental characteristics—microhabitats—that support a unique set of macrofaunal species. Since then, specifics of these microhabitats have become more clear, as have the reasons why they appear to be more common in the deep sea. The formation of micropatches in part reflects how larger organisms such as urchins, sea stars, sea cucumbers, worms and crabs build burrows, tubes and mounds, and move across the sediment, creating small-scale topography.
The patch mosaic also reflects the nonuniform way in which marine snow collects on the seafloor. Microtopography on the seafloor likely catches marine snow in depressions, much as the irregular surface of a lawn receives an uneven coating of light snow. Carbon sinking from above may also aggregate before its arrival at the seafloor. Larvaceans, a type of plankton, secrete a mucus “house” around themselves that filters particles out of the water. These houses can become clogged easily, and larvaceans shed them about once every four hours. The clogged houses are packed with carbon-rich food and arrive at the seafloor as a clumped food source. Also, the variety of patches persists longer in the deep sea because the consistent, rapid currents that homogenize the seafloor in shallow water are often uncommon in the deep. Thus, a quiltwork of microhabitats can develop, leading ultimately to higher species coexistence.
Patterning in food availability drives biodiversity not only at small scales but at larger scales as well. In 1973, Michael Rex published the first study demonstrating the complex pattern of biodiversity with increasing depth. As depth increases and carbon input decreases, diversity increases on the seafloor. At intermediate depths of around 2 to 3 kilometers, the pattern reverses and diversity begins to decline rapidly. This relationship between productivity and diversity, such that diversity is highest at intermediate levels of productivity, is replicated in a variety of other environments and organisms. Multitudes of papers have been published since then trying to explain this pattern. The most likely explanation for the decreasing productivity and decreasing diversity is the Allee effect. Less food availability supports fewer individuals across species. As a population’s numbers fall, species are more likely to go extinct locally due to random environmental perturbations. This lowers the total diversity of an area.
However, why high food availability would support fewer species is a puzzle. Nearly two dozen hypotheses exist to explain this pattern, and their empirical support varies. Earlier this year, Jim Barry of the Monterey Bay Aquarium Research Institute (MBARI) and I published a study that may reconcile this pattern. In submarine canyons, food can collect at the base of the steep canyon walls. We found that highly mobile megafauna such as urchins, sea cucumbers, crabs and sea stars quickly converge in these areas and monopolize the food source. In such numbers, their activities drastically churn the sediment. This disturbance and lack of food creates harsh conditions for the smaller macrofauna dwelling there. Fewer macrofaunal species, including sediment tube builders whose structures would quickly be destroyed, can survive. Thus, at shallower depths where carbon availability is high, megafauna will be more abundant and may ultimately suppress biodiversity of macrofauna.
Observations in the deep can be of use in clarifying our understanding of other habitats as well. Biodiversity is high in the tropics and declines toward the poles. This latitudinal species diversity gradient (LSDG) is observed in a remarkable variety of organisms in marine, terrestrial and freshwater ecosystems. However, explanations for LSDGs remain as varied as the organisms that exhibit this pattern. Theories point to variability in climatic stability, climatic harshness, temperature, speciation rates, extinction rates, parasitism, predation, competition and food availability. In 1993, Michael Rex for the first time documented LSDGs in the deep sea. Rex and his collaborators found heightened diversity near the equator and depression near the poles among mollusks and crustaceans in the Atlantic Ocean. Later work revealed that forams also followed this pattern. These results indicated that LSDGs were probably not related to temperature. The deep sea varies little in temperature, about 4 degrees Celsius, and can be relatively uniform over large swaths of the ocean. But something else does vary with latitude: the amount and variability of plankton production at the ocean’s surface.
Temporal dynamics in food availability can lead to changes in deep-sea biodiversity over geological as well as annual time scales. Utilizing cores from the Ocean Drilling Program, Moriaki Yasuhara of the Smithsonian Institution and his collaborators have probed the history of minute crustaceans, the ostracods, over the past 500,000 years in the tropical deep sea. The last half-million years saw four glacial-interglacial climatic cycles that radically altered the temperature, currents and plankton production of the oceans. Diversity of ostracods in the deep tropical ocean plummeted during glacial periods and their concomitant lower surface production; consequently, during these periods, the LSDG disappeared. Conversely, during interglacial periods, ostracods in the deep tropical ocean became fantastically rich in diversity.
Over much shorter time scales—at the decades level—the El Niño and La Niña cycles, which shift sea-surface temperatures in the tropical Pacific Ocean, can also change patterns in surface production. A site called Station M—submerged 4,000 meters below the ocean’s surface off Santa Barbara, California—has been monitored consistently for nearly two decades, a rarity in deep-sea research. Work by Henry Ruhl and Ken Smith of the Scripps Institution of Oceanography and MBARI at Station M demonstrates that as El Niño and La Niña oscillations occur in Pacific sea surface temperatures, the amount of phytoplankton varies concordantly. And the diversity and abundance of the megafauna and macrofauna also shift. These exceptional studies uncover remarkable temporal patterning in deep-sea diversity that further links surface production and the deep sea.
Studying carbon or energy limitation at its extreme, like that found in the deep ocean, can also provide broad insights into how carbon flows through biological systems in the present and in the deep past. In the aforementioned island rule example, the examination of body-size evolution among deep-sea invertebrates shed light on what drives evolutionary novelty on islands. How the modern deep sea responds to gradients of food across the seafloor also offers evidence regarding how marine fauna have developed over the entire history of life on Earth.

Photograph courtesy of the author.
Some 200 to 100 million years ago, the Mesozoic marine revolution (MMR) was one of the most spectacular reorganizations of life on Earth. In 1995 Richard Bambach of Virginia Polytechnic Institute and State University suggested in another cleverly titled paper, “Seafood Through Time,” that food requirements of marine animals during this period increased based on evidence of increased predation, motility, burrowing, antipredator morphologies, fleshiness, bioencrustation, bioerosion and body size. So increased productivity of the oceans provided the energy needed to drive innovation during the MMR.
A recent paper by Seth Finnegan of Stanford University and California Institute of Technology and his collaborators, including myself, tried to explain the MMR from another angle. We explored what would have been the likely energy or food demands through time by one of the most dominant groups in the fossil record: snails. We approached this by combining information from the marine fossil record, modern oceans both shallow and deep, physiological data from living species and mathematical equations to estimate energy consumption—and thus the amount of energy—needed to sustain life. Calculated with equations derived a century ago, the temperature and body size of an individual animal can tell much about its basic energy requirements, or metabolism. Larger and warmer organisms utilize more energy. The metabolic requirement for entire assemblages of organisms is simply the individual need multiplied by the number of individuals.
To obtain the demands for communities of snails in the distant past, we extrapolated from our knowledge of modern snails. Comparing snails before and after the MMR, we found that per capita metabolic rates rose by about 150 percent, a change largely attributed to increases in body size. If we account for the increased presence of carnivores, metabolically more expensive organisms, the percentage of increase in the metabolic rate after the MMR would be substantially higher. By demonstrating that a similar shift in metabolic demand occurs from the food-limited deep into productive coastal waters, we provided evidence that ocean productivity 200 to 100 million years ago would have needed to increase to support this change.
I write about our growing insight into the deep sea as Earth is entering another period of momentous fluctuation. As the emission of greenhouse gases changes our planet’s climate, evidence is growing that we have already altered the production and movement of carbon in the oceans. Recent work demonstrates that some areas in the oceans have seen 50-percent reductions in phytoplankton production, whereas others have experienced 50-percent increases. Daniel Boyce of Dalhousie University and his colleagues recently reported that phytoplankton production globally has declined over the last century. This redistribution and reduction of carbon at the ocean surface could alter the deep sea in profound ways in the near decades. Yet, changes in carbon cycling are just one of many daunting threats facing the oceans. A combination of overfishing, pollution, mining, warming and acidification may prove a dangerous cocktail.
Deep-sea organisms exist at environmental extremes of temperature, pressure and, of course, food availability. Across levels of biological organization, from individuals to the ecosystem, extraordinary ecological and evolutionary transformations have taken place in lockstep with those limits. As human activity further alters the deep sea, will its species adapt or perish?
Click "American Scientist" to access home page
American Scientist Comments and Discussion
To discuss our articles or comment on them, please share them and tag American Scientist on social media platforms. Here are links to our profiles on Twitter, Facebook, and LinkedIn.
If we re-share your post, we will moderate comments/discussion following our comments policy.