
This Article From Issue
March-April 2024
Volume 112, Number 2
Page 70
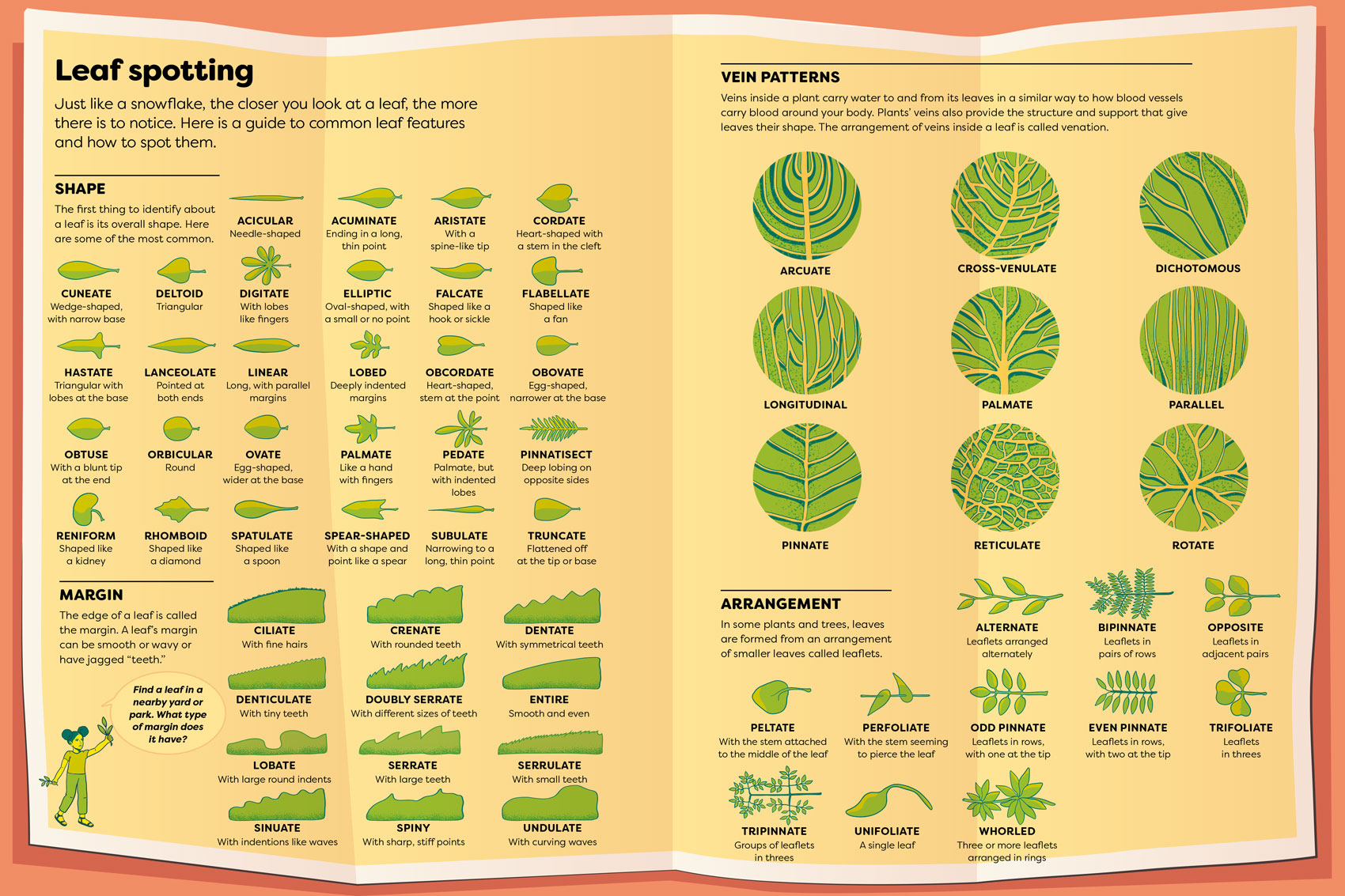
Just like a snowflake, the closer you look at a leaf, the more there is to notice. Here is a guide to common leaf features and how to spot them.
Shape
The first thing to identify about a leaf is its overall shape. Here are some of the most common.
Margin
The edge of a leaf is called the margin. A leaf's margin can be smooth or wavy of have jagged "teeth."
Ad Right
Vein Patterns
Veins inside a plant carry water to and from its leaves in a similar way to how blood vessels carry blood around your body. Plants' veins also provide the structure and support that give leaves their shape. The arrangement of veins inside a leaf is called venation.
Arrangement
In some plants and trees, leaves are formed from an arrangement of smaller leaves called leaflets.
From Britannica’s Encyclopedia Infographica: 1,000s of Facts and Figures about Earth, Space, Animals, the Body, Technology, and More Revealed in Pictures. Infographics by Valentina D’Efilippo, written by Andrew Pettie and Conrad Quilty-Harper, published by Britannica Books, copyright 2023.
American Scientist Comments and Discussion
To discuss our articles or comment on them, please share them and tag American Scientist on social media platforms. Here are links to our profiles on Twitter, Facebook, and LinkedIn.
If we re-share your post, we will moderate comments/discussion following our comments policy.